

En la automatización industrial, entender qué son los sensores de un robot es una de esas preguntas que marcan el inicio de un viaje fascinante por el interior de la tecnología que hace posible la robótica moderna. ¿Cómo sabe un robot qué hay a su alrededor? ¿Qué tipos de sensores existen y para qué sirve cada uno?
Este artículo no solo te plantea esas preguntas, sino que te acompaña paso a paso para que descubras, entiendas y analices en profundidad el papel de los sensores en la robótica industrial. Sigue leyendo y empieza a ver a los robots con otros ojos.
Índice
Qué son sensores en robótica
Los sensores en robótica son dispositivos que captan variables físicas como posición, distancia, fuerza, temperatura o luz, y las convierten en señales eléctricas que el sistema de control del robot puede interpretar. Esta capacidad sensorial es esencial para que un robot funcione de forma eficiente, segura y adaptativa en un entorno cambiante.
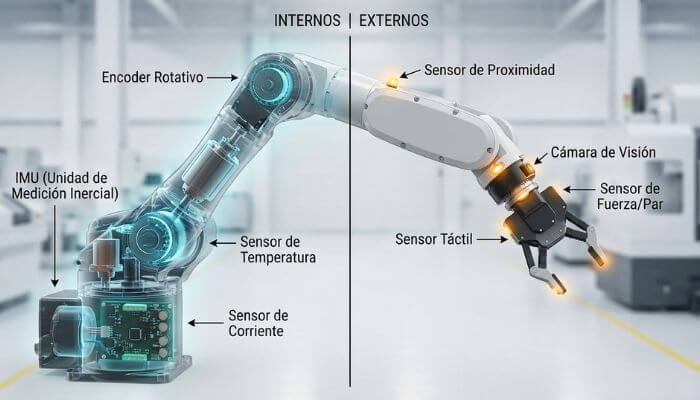
En la robótica industrial, estos sensores permiten automatizar tareas con alta precisión, detectar fallos en tiempo real y evitar colisiones o errores de ensamblaje. Existen dos categorías principales:
- Sensores internos: Monitorean el estado del propio robot, como la posición de sus articulaciones o su velocidad.
- Sensores externos: Captan información del entorno, como la presencia de objetos, la temperatura ambiental o la distancia a obstáculos.
Cómo funcionan los sensores en robótica industrial
El principio básico de funcionamiento de un sensor es la transducción: convertir una magnitud física en una señal eléctrica. Esta señal puede ser analógica o digital y es enviada al controlador del robot, que la interpreta para tomar decisiones o ajustar su comportamiento.
Por ejemplo, un sensor de proximidad puede detectar la presencia de una pieza y activar una acción específica. En otros casos, sensores más avanzados como los de visión artificial permiten al robot identificar objetos con forma y posición variable.
Tipos de sensores en robótica
A continuación se describen los tipos de sensores en robótica más comunes, sus principios de funcionamiento, ventajas, limitaciones y aplicaciones:
Sensores de proximidad
Detectan la presencia de objetos cercanos sin contacto físico. Usan principios como:
- Inducción electromagnética (para objetos metálicos)
- Capacitancia (para materiales no metálicos)
- Ultrasonido o infrarrojo (para todo tipo de materiales)
Aplicaciones: detección de piezas en cintas transportadoras, finales de carrera sin contacto, prevención de colisiones.
Sensores de visión (visión artificial)
Permiten al robot “ver” usando cámaras y procesadores de imagen. Capturan imágenes 2D o 3D y extraen información como forma, color, posición u orientación.
Aplicaciones: inspección de calidad, guiado de robots, lectura de códigos, detección de defectos.
Sensores de fuerza/torque
Miden las fuerzas y momentos aplicados sobre el robot. Se instalan generalmente en la muñeca del robot o en herramientas.
Aplicaciones: ensamblaje de piezas, tareas de pulido/lijado, detección de colisiones, control por aprendizaje manual.
Sensores de temperatura
Detectan cambios de temperatura usando termopares, termistores o sensores de estado sólido.
Aplicaciones: protección de motores, control de procesos térmicos (soldadura, curado), garantía de condiciones ambientales.
Sensores de posición (encoders)
Informan sobre la posición y el desplazamiento de componentes mecánicos. Pueden ser incrementales o absolutos.
Aplicaciones: control de movimientos en brazos robóticos, sistemas de transporte, sincronización con cintas.
Otros sensores comunes
- IMU (acelerómetros y giroscopios): para equilibrio, orientación y detección de vibraciones.
- Sensores de presión: para sistemas neumáticos o hidráulicos.
- Sensores táctiles: para contacto directo y seguridad.

Tabla comparativa de tipos de sensores
| Tipo de sensor | Magnitud detectada | Ejemplos de uso | Contacto requerido |
| Proximidad (IR, inductivo, ultrasónico) | Presencia/distancia | Detección de piezas, anticolisión | No |
| Visión artificial (2D/3D) | Imagen / Posición visual | Inspección de calidad, guiado, SLAM | No |
| Fuerza/Torque | Fuerza aplicada | Ensamblaje, pulido, seguridad | Sí |
| Temperatura | Calor / temperatura | Protección de componentes, control térmico | Puede que sí |
| Posición (encoders) | Movimiento / desplazamiento | Control de ejes, posición de brazos | No |
| Inerciales (IMU) | Aceleración / orientación | Estabilidad, navegación inercial | No |
| Presión / vacío | Presión de fluidos | Ventosas, cilindros neumáticos | Puede que sí |
Importancia de los sensores en robótica industrial
Los sensores en robótica industrial son esenciales para la seguridad, precisión y eficiencia en los procesos automatizados. Permiten que los robots trabajen junto a humanos (cobots), se adapten a variaciones en las piezas y tomen decisiones en tiempo real. Además, combinando sensores internos y externos, se logra una operación robusta y confiable.
En la era de la Industria 4.0, la sinergia sensorial de los robots es lo que hace posible una fabricación inteligente, autónoma y centrada en la calidad.
¿Quieres aplicar estos sensores en un entorno industrial real?
En Konetia Automatización te ayudamos a impulsar la transformación digital de tu planta.
Contáctanos para una propuesta sin compromiso.
Preguntas Frecuentes sobre los Sensores de un Robot
¿Por qué un robot no puede funcionar correctamente sin sensores?
Un robot no puede funcionar correctamente sin sensores porque no es capaz de percibir su estado ni el entorno, lo que impide corregir errores, adaptarse a cambios y operar de forma segura.
¿Cómo influyen los sensores en la precisión y repetibilidad de un robot industrial?
Los sensores permiten detectar desviaciones y corregir movimientos en tiempo real, mejorando la precisión, la repetibilidad y la calidad de los procesos automatizados.
¿Qué diferencia hay entre usar sensores externos y depender solo de sensores internos del robot?
Los sensores internos informan sobre la posición y el estado del robot, mientras que los sensores externos aportan información del entorno; la combinación de ambos permite una operación más flexible y segura.
¿Qué sensores son más importantes cuando un robot trabaja junto a personas?
En aplicaciones colaborativas son especialmente importantes los sensores de fuerza, visión y proximidad, ya que permiten detectar presencia humana y reaccionar ante contactos inesperados.
¿Cómo se eligen los sensores adecuados para una aplicación robótica concreta?
La elección de sensores depende del tipo de tarea, la precisión requerida, las condiciones ambientales y el nivel de interacción con otros sistemas o personas.
¿Qué problemas pueden surgir si los sensores de un robot no están bien calibrados?
Una calibración incorrecta puede provocar errores de posicionamiento, colisiones, defectos en el producto final o paradas innecesarias del sistema robótico.
¿Cómo están evolucionando los sensores de robótica con la Industria 4.0?
Los sensores actuales incorporan conectividad, autodiagnóstico y capacidad de integración con sistemas digitales, permitiendo análisis de datos, mantenimiento predictivo y mayor autonomía de los robots.