

Actuadores en robótica
Un robot, como ya sabrás a esta altura, es un dispositivo automatizado, capaz de desempeñar, de forma autónoma o asistida, una determinada tarea.
Sin los actuadores, un robot no sería capaz ni de moverse, ni de ejecutar trabajo alguno.
Índice
¿QUÉ SON LOS ACTUADORES DE UN ROBOT?
Los actuadores son componentes clave en un robot, ya que son responsables de generar el movimiento y la fuerza necesarios, al tiempo que dotarles de capacidad para que el robot realice sus tareas
Un actuador es un dispositivo mecánico, eléctrico o hidráulico que convierte una señal de control en movimiento físico, bien directo o indirecto.
TIPOS DE ACTUADORES EN ROBÓTICA
Los principales tipos de actuadores son:
- Hidráulicos: Se suelen emplear en aplicaciones de robots de grandes dimensiones y que, por lo tanto, requiere el movimiento de cargas especialmente pesadas. Este tipo de actuador ofrece, además de potencia, gran estabilidad en sus desplazamientos. Los diferentes tipos de actuadores hidráulicos en robótica son los motores y los cilindros.
- Neumáticos: Si bien no son los más extendidos, este tipo de actuadores encuentran su aplicación en robots de pequeño tamaño que deben manipular cargas ligeras. Son rápidos y precisos y es común encontrarlos en zonas ATEX o zonas con riesgo de explosión o incendio.
- Eléctricos: Los actuadores eléctricos más comunes utilizados en los robots industriales son los motores eléctricos, especialmente los motores de corriente continua (DC) o los motores paso a paso. Estos motores reciben señales eléctricas de control y generan un movimiento rotativo en sus ejes. Estos motores permiten un control preciso del movimiento y la velocidad del robot.
EJEMPLOS DE ACTUADORES EN ROBÓTICA
Seguidamente te mostramos ejemplos de los principales actuadores empleados en robótica:
Motores neumáticos
Normalmente encontramos motores neumáticos de aletas y de pistones:

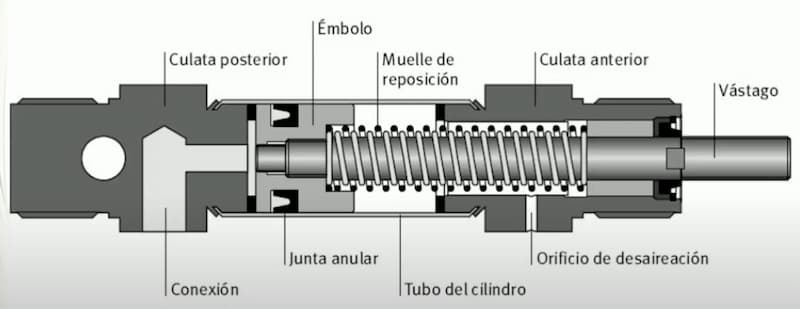
Cilindros neumáticos
Existen de simple efecto o de doble efecto.

Motores hidráulicos
Encontramos motores de pistones y de aletas rotativas

Cilindros hidráulicos
Al igual que en el caso de los cilindros neumáticos, existen cilindros de simple y de doble efecto
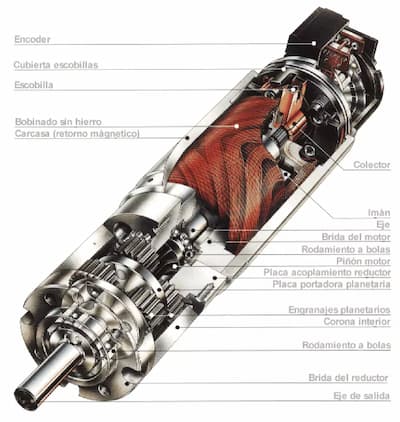
Motores eléctricos de corriente continua
Motores eléctricos de corriente alterna

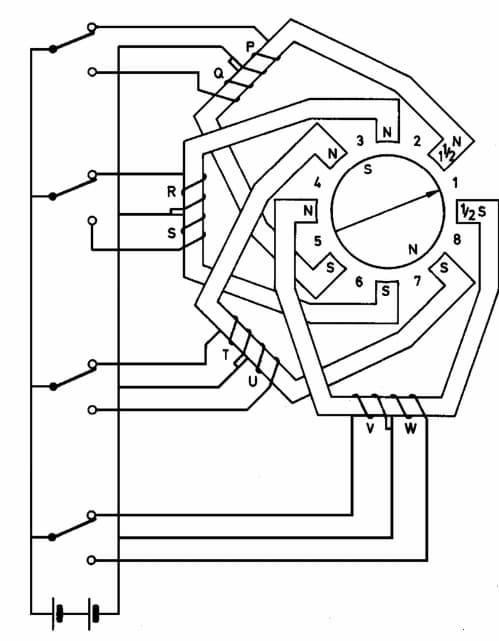
Motores eléctricos paso a paso
VENTAJAS E INCONVENIENTES DE LOS DIFERENTES ACTUADORES
Cada actuador tiene una serie de ventajas e inconvenientes en función del tipo de aplicación, por ello, en la siguiente tabla, realizamos una clasificación de los mismos, mostrando sus puntos fuertes y débiles para cada función.
| Actuador | Neumático | Hidráulico | Eléctrico |
| Ventajas | Baratos Rápidos Sencillos Robustos | Rápidos Potentes | Precisos Fiables Fácil control Silenciosos |
| Desventajas | Difícil en control continuo Ruidosos | Mantenimiento Costosos | Potencia limitada |
ACTUADORES EN ROBÓTICA
Los actuadores permiten que los robots industriales realicen una amplia gama de movimientos, incluyendo rotación, traslación y agarre de objetos. Estos movimientos se logran mediante la combinación de varios actuadores ubicados en diferentes articulaciones del robot.
En resumen, los actuadores son componentes esenciales en un robot industrial, ya que convierten señales de control en movimiento físico. Ya sea mediante motores eléctricos o actuadores hidráulicos, los actuadores permiten que los robots industriales realicen sus tareas con precisión y fuerza, según las necesidades de la aplicación.
Si necesitas más información al respecto de los actuadores, instalación y diseño de aplicaciones robotizadas, no dudes en contactarnos. Te atenderemos sin compromiso.
Preguntas frecuentes sobre actuadores en robótica
1. ¿Cómo seleccionar el tipo de actuador para mi robot?
La selección del actuador se guía por carga, carrera, velocidad, precisión, entorno (p. ej., ATEX) y presupuesto; prioriza el requisito crítico y dimensiona con margen.
2. ¿Cómo influye la precisión y la repetibilidad en la elección del actuador?
La precisión y la repetibilidad orientan hacia actuadores eléctricos (DC/paso a paso) por su control fino; si prima fuerza sostenida, valora hidráulicos con buen control.
3. ¿Qué actuador encaja mejor en entornos ATEX con ciclos rápidos y carga ligera?
En entornos ATEX con ciclos rápidos y carga ligera encajan actuadores neumáticos por seguridad y rapidez; verifica certificaciones y calidad del aire.
4. ¿Qué mantenimiento preventivo mínimo requiere cada tecnología?
El mantenimiento mínimo incluye estanqueidad y fluidos en hidráulicos, filtrado y secado de aire en neumáticos, y revisión de cableado/encoders en eléctricos.
5. ¿Puedo migrar de neumático a eléctrico sin rediseñar toda la célula?
La migración es viable si se prevén interfaces modulares (anclajes, utillajes, E/S, alimentación) y se recalculan par, caudal y potencia para el nuevo actuador.
6. ¿Cómo afecta la elección del actuador al consumo energético y al ruido?
El consumo y el ruido mejoran con eléctricos por eficiencia y funcionamiento silencioso; neumáticos dependen del compresor y son más ruidosos; hidráulicos consumen por bombas y pérdidas.
7. ¿Cómo puede ayudar Konetia Automatización a dimensionar y validar actuadores?
Konetia Automatización dimensiona y valida actuadores analizando cargas y ciclos, selecciona la tecnología idónea (eléctrica/neumática/hidráulica) e integra con PLC/SCADA, con pruebas FAT/SAT.