

Tipos de robots industriales
Cuando hablamos de robots, a la gran mayoría se nos viene a la mente imágenes de películas como Star Wars. Sin embargo, en el mundo industrial, los robots tienen una apariencia y función completamente distintas. En lugar de humanoides parlantes, se trata de brazos mecánicos, sistemas autónomos y maquinaria programable diseñada para optimizar la producción.
Estos robots industriales son la columna vertebral de la automatización moderna, y su impacto en la manufactura, logística y otros sectores es innegable. Pero, ¿qué es realmente un robot industrial? definamoslo
¿Qué es un robot industrial?
Un robot industrial es una máquina programable diseñada para ejecutar tareas específicas en entornos industriales con alta precisión, velocidad y eficiencia. Estos robots dentro de las industrias pueden ser autónomos o controlados por operadores humanos y están equipados con sensores, actuadores y sistemas de inteligencia artificial que les permiten interactuar con su entorno.
Características principales de un robot industrial:
- Autonomía y precisión: Puede realizar tareas repetitivas con exactitud sin necesidad de intervención humana constante.
- Programabilidad: Puede ser reconfigurado para distintas funciones dentro de una línea de producción.
- Sensores y actuadores: Posee tecnología avanzada para detectar su entorno y manipular objetos con precisión.
- Eficiencia operativa: Trabaja a altas velocidades y puede operar las 24 horas del día, lo que optimiza la productividad.
Su objetivo principal es ejecutar operaciones específicas —como ensamblaje, soldadura, pintura, manipulación de materiales o control de calidad— con precisión milimétrica, velocidad constante y eficiencia energética, reduciendo errores humanos y optimizando procesos.
Cada aplicación industrial tiene su propia idiosincrasia, necesidades y requisitos. Por lo tanto, hay que seleccionar, entre diversos tipos de robots industriales, el más adecuado en cada caso.
Índice

Tipos de robots industriales
Según la RIA (Robotics Industries Association), un robot es un manipulador multifuncional reprogramable, capaz de mover materias, piezas, herramientas o dispositivos especiales, según trayectorias variables, programadas para realizar tareas diversas.
Desde que el primer robot industrial hiciese su aparición allá por el año 1937, han ido surgiendo diferentes dispositivos, de diversas formas y aplicaciones. No obstante, atendiendo a su destino dentro de las industrias, los podemos clasificar en cuatro grandes grupos:
Robots cartesianos

Dotado de tres ejes lineales formando 90 grados entre sí. Son robots muy rápidos y con una gran capacidad de movimiento de cargas. Los encontramos en configuración de pórtico o en voladizo y son empleados en procesos de manipulación y almacenamiento de cargas.
Son rápidos y precisos, al tiempo que fáciles de programar. Su inconveniente principal pasa por su relativa poca flexibilidad. Una vez implantados para una tarea, su reconfiguración es costosa.
Robot cartesiano aplicaciones y usos: De los más versatilidad y precisos
Los robots cartesianos se han consolidado como una solución indispensable en la automatización industrial gracias a su capacidad para ejecutar tareas con exactitud milimétrica, flexibilidad de configuración y adaptabilidad a entornos dinámicos. Sus aplicaciones del robot cartesiano abarcan desde ensamblajes complejos hasta procesos de alta repetibilidad, destacando en sectores donde los márgenes de error son críticos. A continuación, exploramos los usos más relevantes de esta tecnología en la manufactura contemporánea.
Principales Aplicaciones del Robot Cartesiano por Sector
1. Industria Automotriz: Precisión en cada componente
- Ensamblaje de motores y chasis: Colocación exacta de piezas, soldadura de componentes y atornillado de estructuras críticas.
- Aplicación de adhesivos y sellantes: Dispensado automatizado en paneles, parabrisas o sistemas eléctricos, garantizando uniformidad y resistencia.
- Control de calidad: Inspección de componentes mediante sensores o cámaras integradas, identificando defectos en tiempo real.
2. Electrónica y semiconductores: miniaturización con exactitud
- Colocación de microcomponentes: Manipulación de circuitos impresos (PCB) y chips con tolerancias inferiores a 0.1 mm.
- Corte láser y perforación: Mecanizado de placas electrónicas siguiendo trayectorias importadas desde archivos DXF.
- Pruebas automatizadas: Verificación de funcionalidad en dispositivos, reduciendo tiempos de producción.
3. Aeroespacial: Tecnología para altos estándares
- Mecanizado de materiales compuestos: Corte y ruteado de paneles de fibra de carbono o aluminio para estructuras aeronáuticas.
- Atornillado de precisión: Ensamblaje de componentes estructurales con control de par y seguimiento de torque.
- Dispensado de resinas: Aplicación de recubrimientos especializados en piezas expuestas a condiciones extremas.
4. Farmacéutica y médicina: Higiene y exactitud
- Dosificación de sustancias: Manejo estéril de medicamentos o reactivos en laboratorios, evitando contaminación cruzada.
- Ensamblaje de dispositivos: Montaje de instrumentos quirúrgicos o equipos de diagnóstico con movimientos controlados.
- Embalaje seguro: Sellado y etiquetado de productos médicos en ambientes regulados.
5. Logística y embalaje: Eficiencia en la cadena de suministro
- Empaque rápido: Sellado, etiquetado y clasificación de mercancías en líneas de alta velocidad.
- Paletización inteligente: Organización de productos en tarimas según peso, tamaño o destino.
Robots Delta o Robots araña
Estos robots reciben su pseudónimo de araña debido a su aspecto. De su cuerpo, normalmente de formas redondeadas y suspendido en altura, cuelgan tres patas que se unen en el extremo inferior.
Esta configuración les dota de una enorme rapidez y agilidad, pudiendo actuar en un área considerablemente grande en comparación a su reducido tamaño.
Son usados en tareas donde se requiera la manipulación de productos de tamaño y peso reducido con cierto grado de precisión.

Robots SCARA

Reciben su nombre del acrónimo Selective Compliant Assembly Robot Arm.
Están formados por cuatro ejes, uno de ellos de carácter rotativo. Están especialmente diseñados para tareas de ensamblaje donde se requiera repetitividad y una gran precisión.
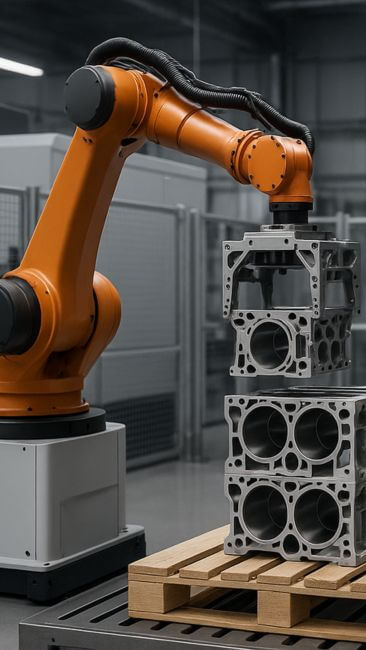
Qué son los robots antropomórficos
Los robots antropomórficos son una de las categorías más extendidas dentro del sector de la automatización industrial. Su nombre proviene de su semejanza con la morfología humana, ya que cuentan con un cuerpo principal del que emerge un brazo articulado, capaz de reproducir movimientos similares a los del brazo humano. Esta capacidad los hace especialmente útiles para tareas que requieren destreza, precisión y adaptabilidad.
Estos robots antropomorfos, también conocidos como robots articulados, suelen disponer de seis ejes de movimiento, lo que les permite alcanzar casi cualquier posición en el espacio tridimensional. Gracias a esta flexibilidad, son ampliamente utilizados en procesos como soldadura, pintura, ensamblaje, paletizado o manipulación de piezas.
Además, su estructura modular permite incorporar diferentes herramientas, desde pinzas hasta cabezales de soldadura. Por su velocidad y fuerza, suelen operar en áreas protegidas para garantizar la seguridad de los trabajadores. No obstante, existen también versiones colaborativas —los llamados cobots— que pueden trabajar junto a personas, integrando sensores de fuerza y protocolos de seguridad avanzados.

Subtipos destacados
Cobots: Es un tipo de robots diseñados para compartir espacio con humanos sin vallado de seguridad, con movimientos más lentos y controlados a velocidad de trabajo es mucho menor. No requieren de vallado de seguridad.
Robots antropomórficos de 4 ejes: más limitados en movimiento, son ideales para tareas repetitivas como el paletizado.
AGV (Automatic Guided Vehicles)

Quizás esta es la última familia de robots que ha hecho su aparición en escena. Como su nombre indica (Vehículos de Guiado Automático) se trata de vehículos autónomos, cuya función es el transporte de cargas, normalmente por el interior de las instalaciones de las empresas.
En función del tipo de guiado, existen una amplia variedad de este tipo de robots. Sólo a modo de información, los tipos más comunes son: AGV de guiado magnético, filoguiado, guiado óptico, guiado mediante visión artificial y guiado por GPS.
Elección del Robot Industrial Ideal
En este aspecto, el equipo de Konetia tiene como misión primordial el asesoramiento del cliente para ayudarle a seleccionar el tipo y la marca de robot industrial más adecuado para cada aplicación.
Para ello realizamos un estudio minucioso siguiendo los puntos que seguidamente mencionamos:
- Análisis del proceso a automatizar.
- Análisis del entorno (atmósferas explosivas, presencia de trabajadores, etc.)
- Tipología de cargas.
- Precisión requerida y repetitividad.
- Tiempos de ciclo y cadencia.
- Flexibilidad del proceso.
robots antropomorfosr